The first experiment of Monocular Depth Estimation through deep learning over a quadruped robot. Peiman Naseradinmousavi 0:12 2 months ago 90 Скачать Далее
Why should you use something else except monocular depth estimation Sid1057 0:11 3 years ago 13 654 Скачать Далее
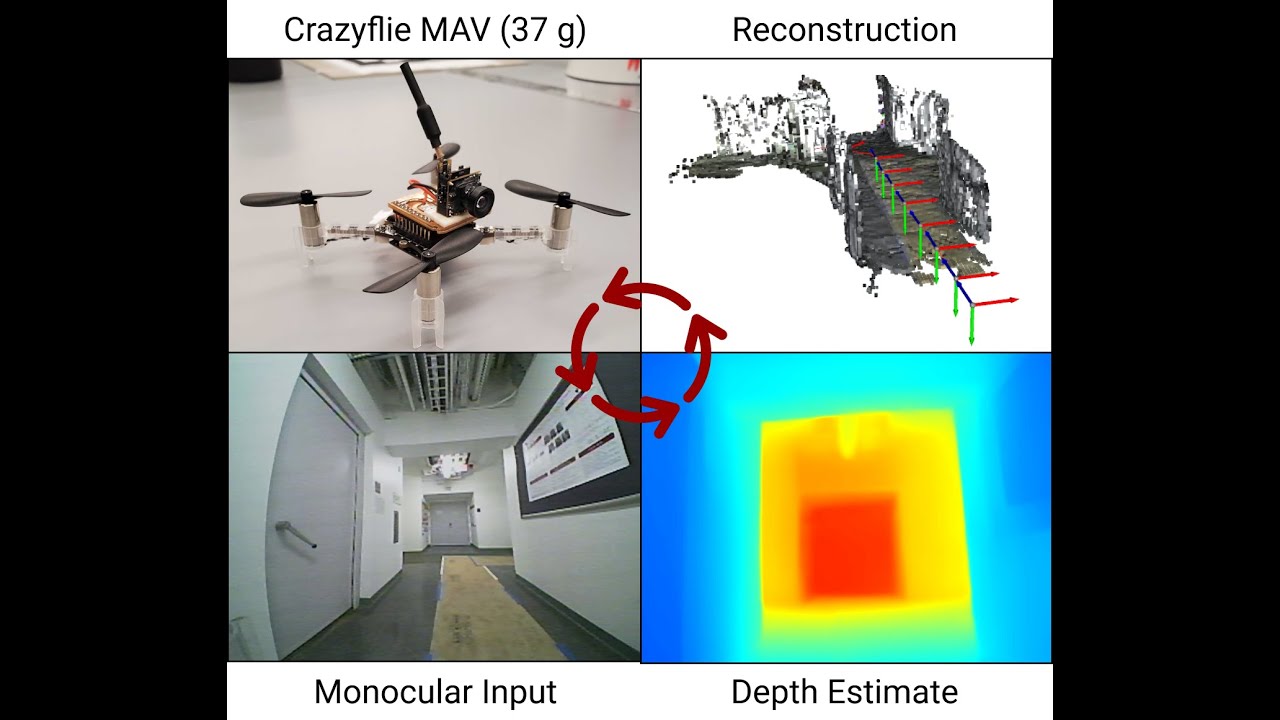
(Preview) MonoNav: MAV Navigation via Monocular Depth Estimation and Reconstruction Intelligent Robot Motion Lab 8:23 9 months ago 2 370 Скачать Далее
Towards Domain Independence for Learning-Based Monocular Depth Estimation for Drones UZH Robotics and Perception Group 3:37 7 years ago 1 887 Скачать Далее
Monocular Depth Estimation with MiDaS Neural Networks Nicolai Nielsen 21:37 2 years ago 33 663 Скачать Далее
EdgeConv with Attention Module for Monocular Depth Estimation ComputerVisionFoundation Videos 4:23 1 year ago 126 Скачать Далее
Diana Wofk—Fast and energy-efficient monocular depth estimation on embedded systems MIT.nano 34:24 3 years ago 1 892 Скачать Далее
Real-time and accurate self-supervised monocular depth estimation on mobile devices Qualcomm Research 6:13 2 years ago 3 345 Скачать Далее
3D Packing for Self-Supervised Monocular Depth Estimation ComputerVisionFoundation Videos 4:58 4 years ago 1 419 Скачать Далее
Self-Supervised Human Depth Estimation From Monocular Videos ComputerVisionFoundation Videos 1:01 4 years ago 202 Скачать Далее
Real time practical monocular 3D perception | ACV Meetup Thibault Neveu 44:05 2 years ago 1 181 Скачать Далее
3rd Monocular Depth Estimation Challenge CVPR 2024 CVSSP Research 4:05:11 5 days ago No Скачать Далее
Self-Supervised Monocular Depth Estimation: Solving the Edge-Fattening Problem ComputerVisionFoundation Videos 3:59 6 months ago 28 Скачать Далее
Quadruped Robot Dog-MATLAB simulate Inverse kinematic Trot step Eddie 0:23 1 year ago 16 483 Скачать Далее
Self-Supervised Monocular Trained Depth Estimation Using Self-Attention and Discrete Disparity... ComputerVisionFoundation Videos 1:01 4 years ago 1 359 Скачать Далее